In FRC, omni-directional drive (a drive base that can move and rotate in any direction) is a massive advantage. Swerve is the best drive base because it enables full traction, high torque, omni-directional drive. It is also incredibly expensive.
To try and keep up with Swerve teams on a lower budget, Team 4788 wanted a solution that enabled high traction, and omni-directional drive, at low cost, and high reliability. Butterfly drive was considered, but was concluded to take up too much space, use too much air, and have too many failure points. Team 4788 instead developed the Western Australia Sideways Propulsion drive base.
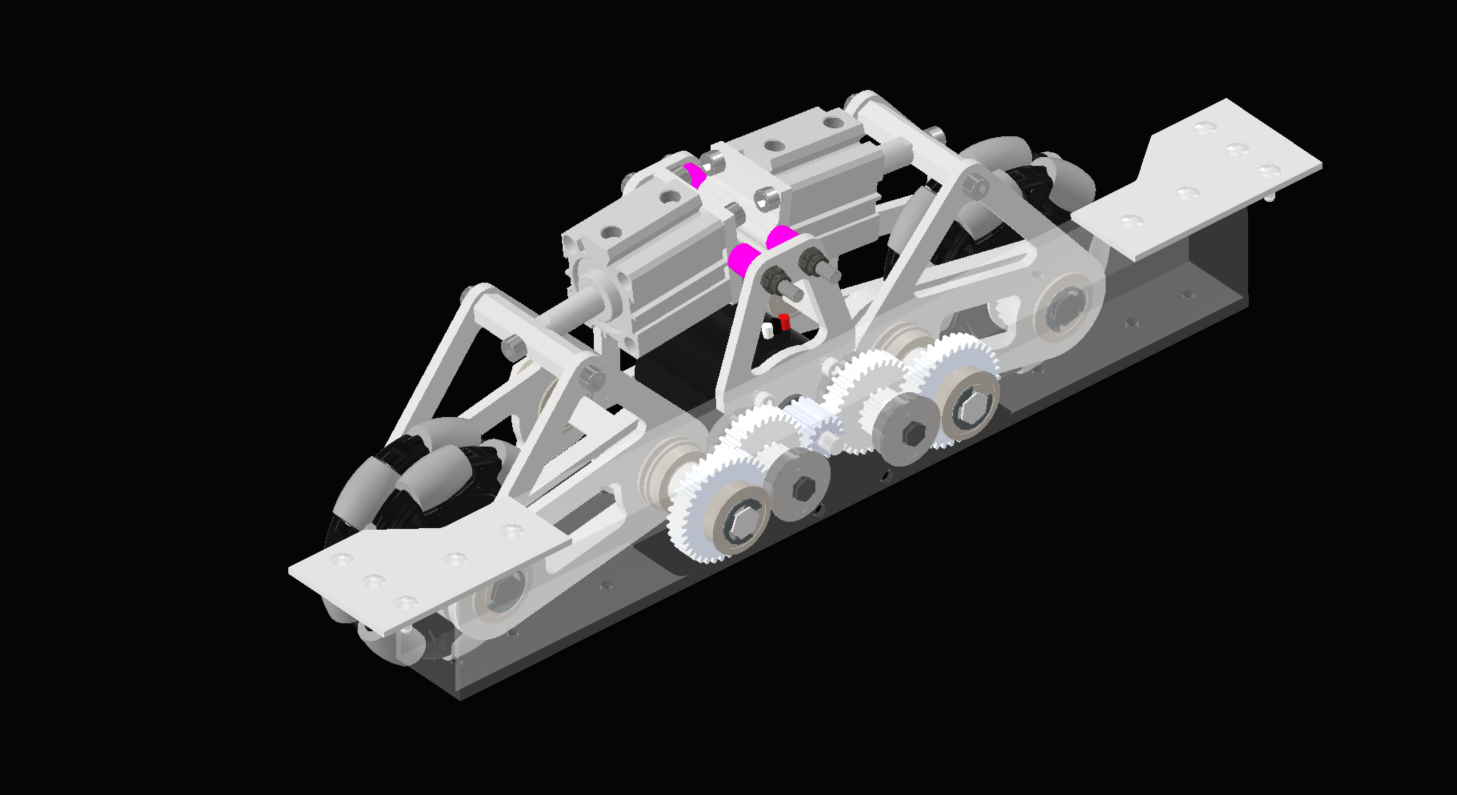
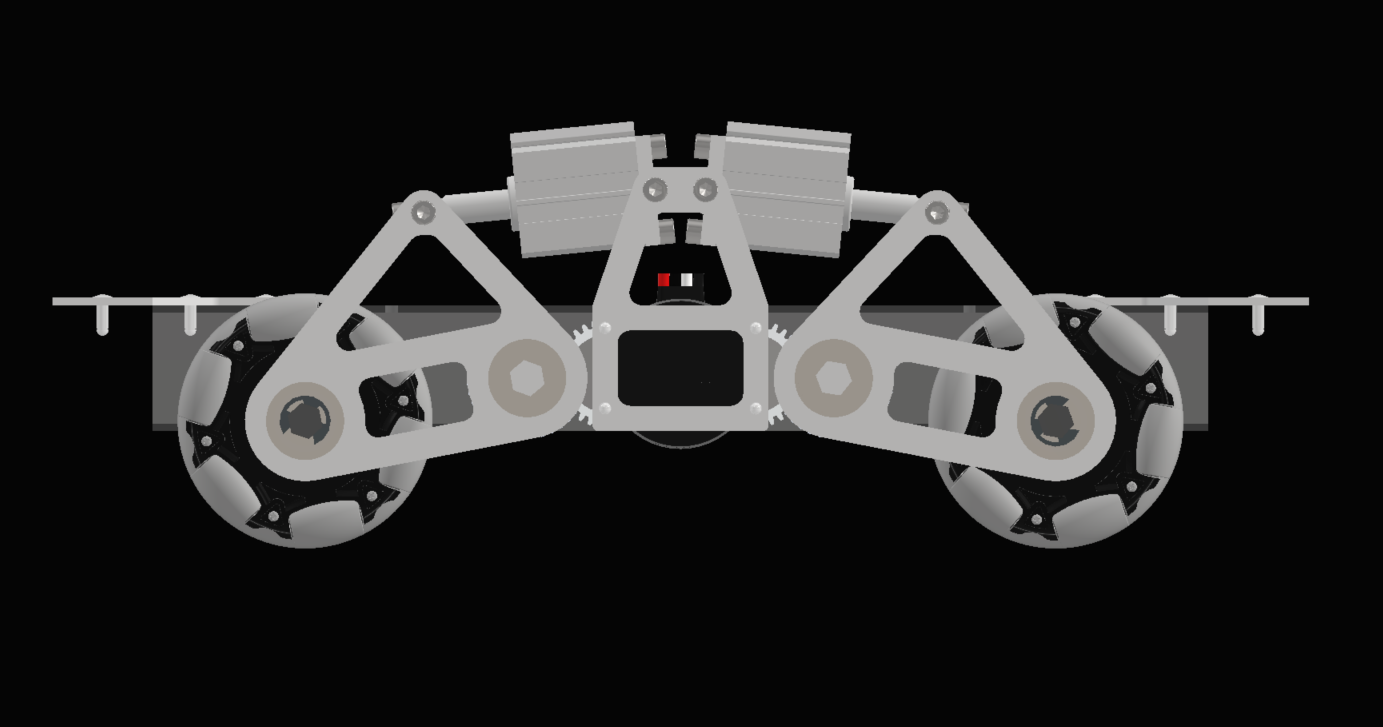
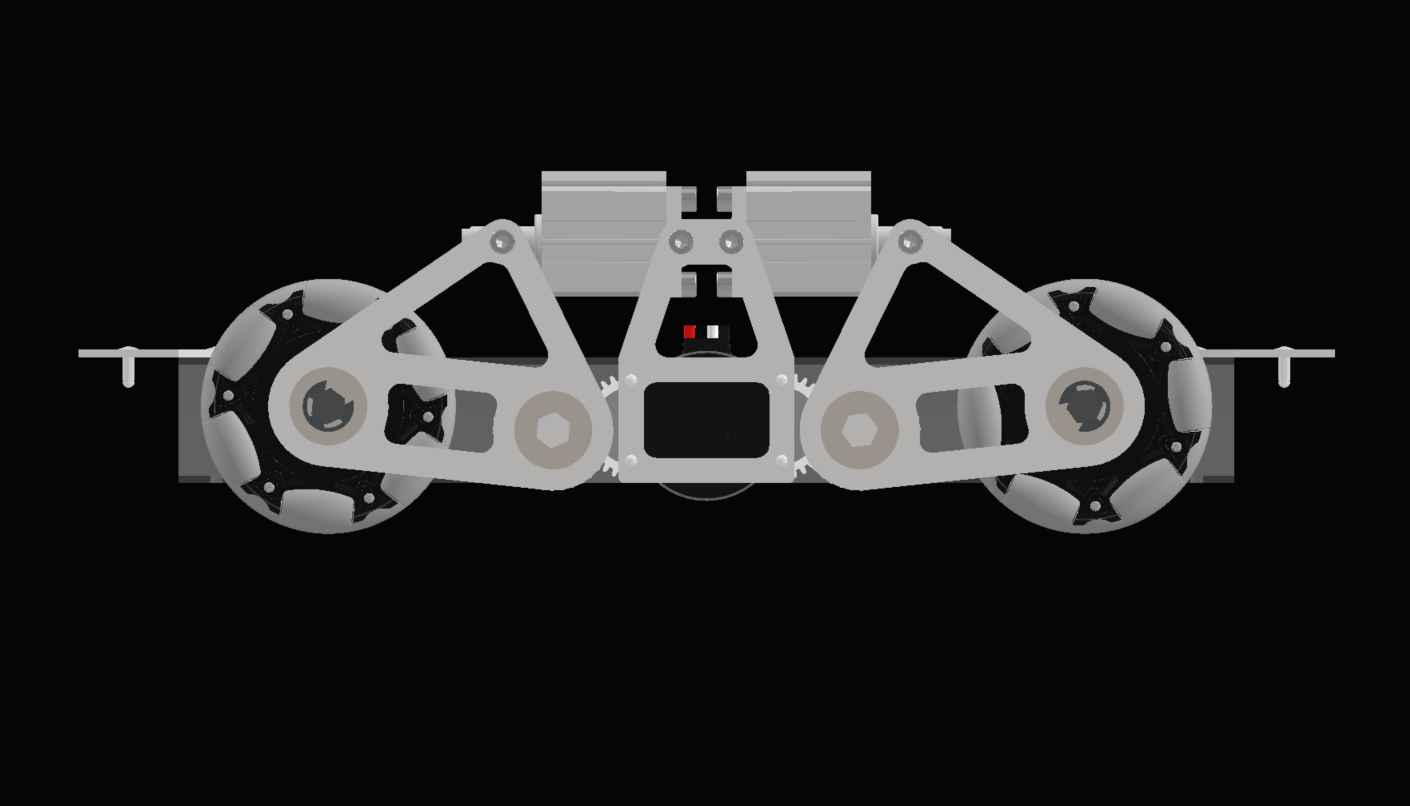
W.A.S.P. is based on West Coast Drive (WCD or tank drive), with the addition of a module at the back. This module drops down two omni-wheels, and tips the robot up off the traction wheels, onto the meccanum wheels at the front. The omni-wheels push the robot sideways, and the torque from the off center force is counteracted by driving the sides in opposite direction.