Adelaide Robot Combat gives a 100% weight bonus to "non-wheeled" robots. As such, if you can build a walking mechanism that weighs less than 150g, your weapon could weigh more than most robots. This means more damage to them, and the increased weight means less damage to you. Walking robots are generally not very maneuverable.
With all this considered I wanted to emphasise the damage, and decrease the need for maneuverablitity, which lends itself to full body and ring spinners. Ring Spinner was chosen to maintain invertability.
The rules differentiate between shuffling and walking. Shuffling has continous motor motion, and a 50% weight bonus. So no fancy linkages for us. Broken Link Robotics has a very good video on Revolve (a shuffling ring spinner), which I'm taking a lot of inspiration from.
So with shuffling "out" of the question, we need a "real" leg. The plan is to develop a very simple forwards/backwards leg, and then kinda drag the back of the robot around, steering by varying the speed of the legs.
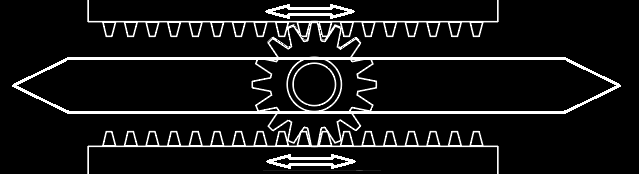
Therefore we need two degrees of freedom, so at least two inputs. I don't know if it's been done before but I thought of using a differential rack and pinion. So two parrallel racks on either side of a pinion. If the racks move in opposite directions the pinion rotates. If the racks move in the same direction the pinion moves vertically. These can be combined to make the leg, as shown below.
A massive advantage of this system is its easy to make invertible, just a programming problem.
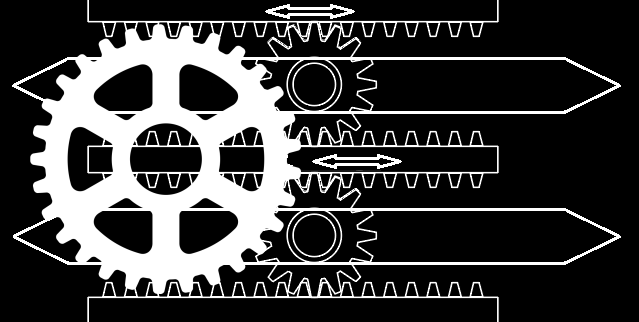
I think I can then put another rack and pinion opposite, and connect the two outer racks with another gear (vaguely suggested below), then one can be stepping while the other is returning. Im not sure if the kinematics of this work, so I'll have to look into it further.
Not much has really happened beyond the concept. The next step will probably be to prototype and test the leg, I'll probably write something after that.