I started by solving the kinematics and inverse kinematics on a whiteboard. I then translated it into a desmos graph (see below), to play around with all the things I can tweak and see what feels right. My main concern was ensuring the gears were large enough to print. I settled on 30mm leg and 10mm radius pinion.
The blue line is the foot positions, and the red line is a representation of the rack positions. The x-coordinate is the height of one rack and the y-coordinate is the height of the other.

The racks constrain the leg vertically and horizontally. It needs to be constrained axially to avoid being pulled/falling out. To achieve this I'm using herringbone gears on the racks and pinion. I've never modeled these before, so I printed a test, shown below. It started way too tight, so i reduced the overall dimensions of the racks, and then it worked pretty well.
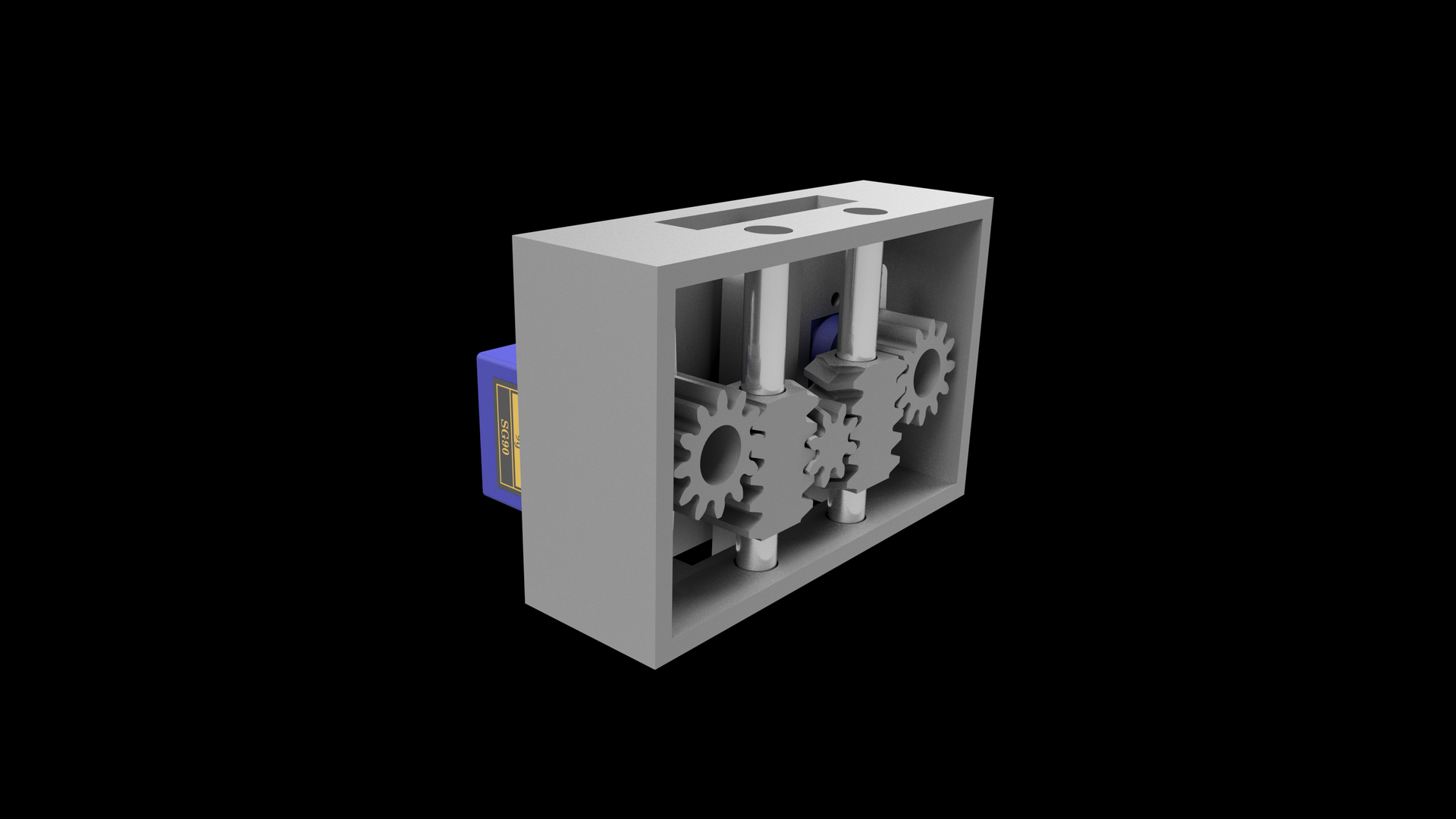
With that test succesfulish I then modeled the servos and how they power the racks. This will all probably change but whatever. For now I'm not using any bearings, they just aren't neccesary with the forces and speeds I'm working at. If you really care just pretend I'm using bushings...
I printed everything out and immediately discovered I needed even more space between the pinions and the gears. New racks again I geuss... I also had trouble because one of the splines on my servo was stripped which was weird. But once that was all resolved I moved on to programming.
All the code and CAD is available on the github. Currently its running on an Arduino Nano, though at some point I'll probably make a custom board. Currently implemented features include:
- Custom step paths
- Rapiding when not on the ground
- Settable speed when rapiding or on the ground
- Reverse
- Upside Down
The current test module is over 50mm tall and 60g. I'm going to try drop that to under 30mm and 40g. Next will probably build two modules and test the driving. I'll might also experiment with a second leg powered by the same servos.